

YFROBOT
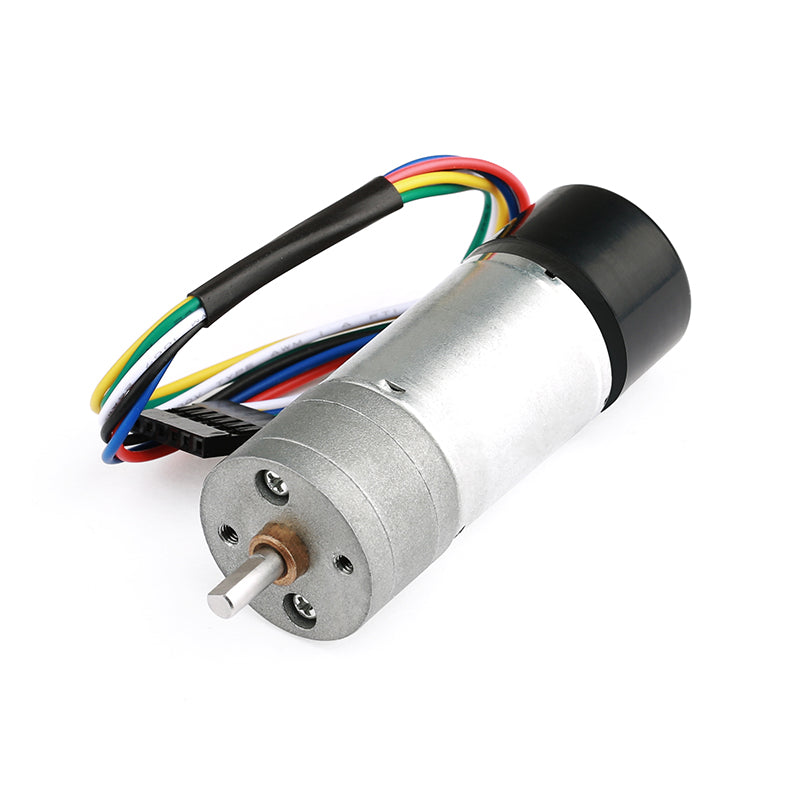
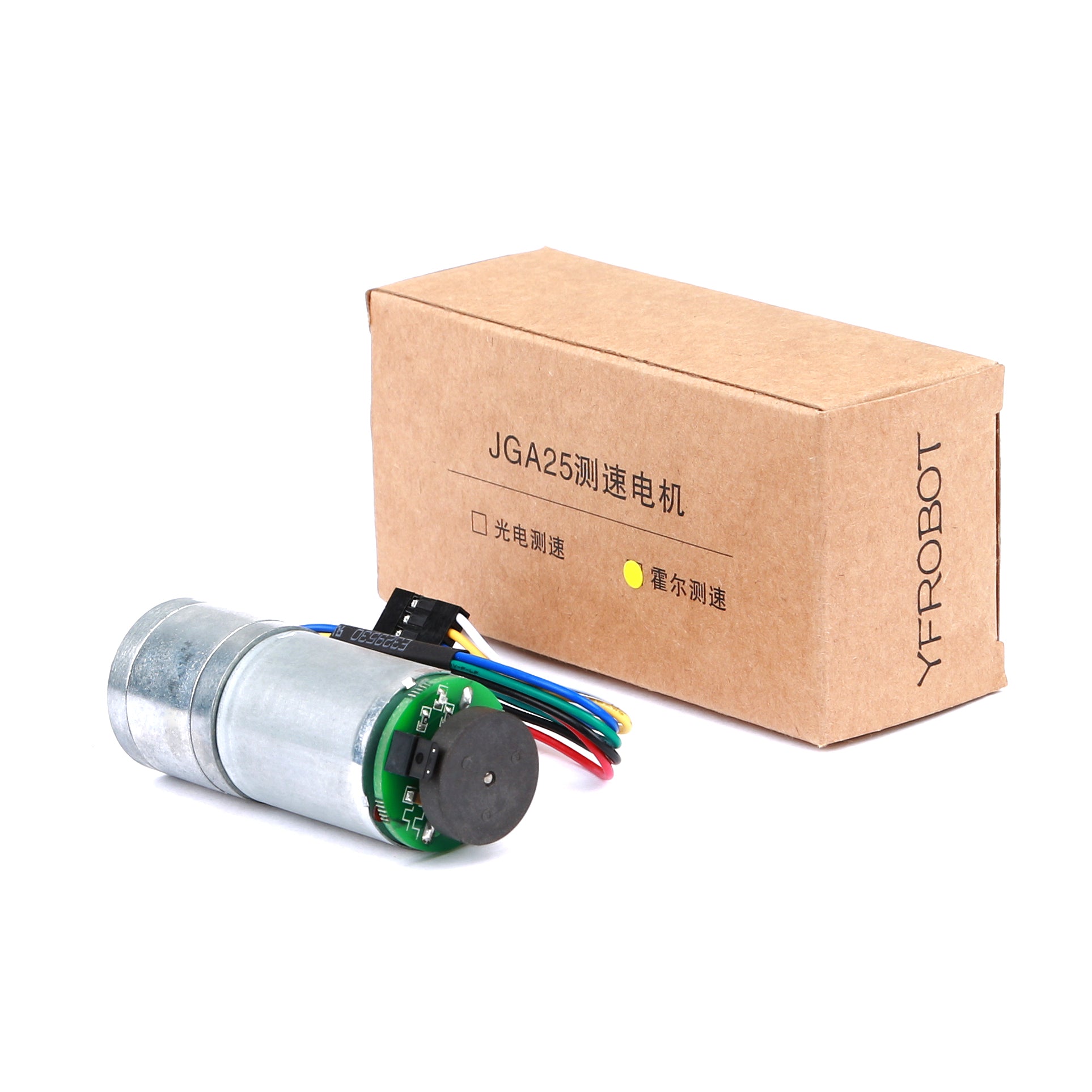
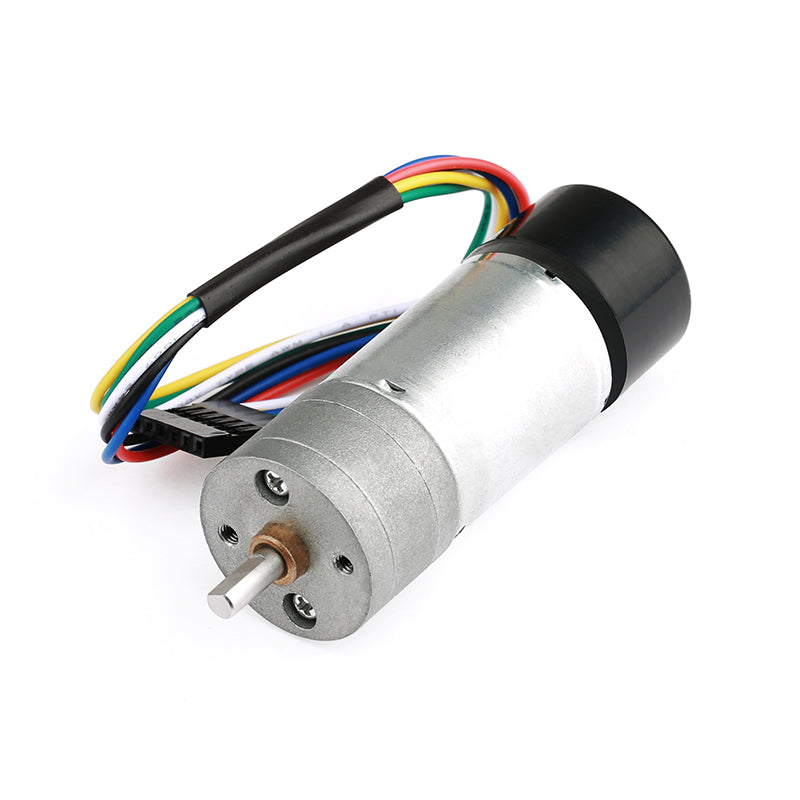
YFROBOT Metal Gearmotor GA25 12V with 13 CPR Encoder Hall speed measurement
YFROBOT Metal Gearmotor GA25 12V with 13 CPR Encoder Hall speed measurement
Couldn't load pickup availability
Overview:
These brushed DC gearmotors have a diameter of 25mm (0.984 inches), with all versions available with an integrated quadrature encoder on the motor shaft. The 12V motors provide roughly the same performance at their respective rated voltages.Its motor shaft is a 4mm D-shaft.
These motors can typically be run at voltages above and below their rated voltage, with lower voltages being less practical and higher voltages beginning to have a negative impact on the motor's lifespan.
The gearboxes are primarily made up of spur gears, but their first stage uses helical gears to reduce noise and increase efficiency.
Using the Encoder:
A dual-channel Hall effect encoder is used to detect the rotation of a disk on the back of the motor shaft. The quadrature encoder provides a resolution of 52 counts per motor shaft revolution by calculating two counts for each edge between the two channels. To calculate the counts per revolution of the gearbox output, multiply the gear ratio by 52. The motor/encoder has six colored, 8-inch (20 cm) leads with a 1×6 female header on the end with a 0.1″ spacing, as shown in the main product picture. The header pins can be used with a plug. If this plug is not convenient for your application, you can pull the wires out of the plug or cut off the plug. The table below describes the function of each wire.
| Color | Function |
|---|---|
| Red | motor power (connects to one motor terminal) |
| Black | motor power (connects to the other motor terminal) |
| Green | encoder GND |
| Blue | encoder Vcc (3.5 – 5 V) |
| Yellow | encoder A output |
| White | encoder B output |
The Hall sensor requires an input voltage Vcc between 3.5 and 20V, with a maximum current of 10 milliamps. The A and B outputs are square waves that are approximately 90° out of phase, with a voltage range of 0V to Vcc. The transition frequency tells you the speed of the motor, while the transition sequence tells you the direction.
The oscilloscope capture shown above displays the A and B (yellow and white) encoder outputs for a 12V motor and a 5V Hall sensor Vcc. By calculating the rising and falling edges of the A and B outputs, 52 counts are obtained for each motor shaft. Using a single edge from only one channel would result in 13 counts per motor shaft, so the frequency of the A output in the above oscilloscope capture is 13 times the rotational frequency of the motor.
Precautions
- This product does not have waterproof function, and it is strictly prohibited to use in water or damp environments.
- Short circuit between positive and negative poles is prohibited.
- Obtain information through email.
Motor parameters
|
Gear ratio 1:xx |
Rated voltage (V) |
No-load speed (rpm/min) |
Load speed (rpm/min) |
Rated torque (kg.cm) |
Current rating (mA) |
Load torque (kg.cm) |
Stall current (mA) |
|
1:34 |
6 |
147 |
118 |
0.75 |
500 |
4 |
2100 |
|
12 |
294 |
236 |
1.4 |
650 |
5.2 |
2200 |
|
|
1:75 |
6 |
66 |
57 |
1.5 |
650 |
8 |
2100 |
|
12 |
133 |
115 |
2.6 |
650 |
10 |
2200 |
Electrical characteristics
|
Specification |
Symbol |
Test Condition |
Min |
Typical |
Max |
Unit |
|
Input Voltage |
Vcc |
-- |
2.7 |
5 |
5.5 |
V |
|
Output Saturation Voltage |
Vce(sat) |
VCC=14V; IC=20mA |
- |
300 |
700 |
mV |
|
Output Leakage Current |
Icex |
VCC=14V; VCC=14V |
- |
<0.1 |
10 |
A |
|
Input Current |
Ice |
VCC=20V, output open |
- |
5 |
10 |
mA |
|
Output Rise Time |
Tr |
VCC=14V; RH=820Ω;CH=20pF |
- |
0.3 |
1.5 |
S |
|
Output Fall Time |
Tr |
VCC=14V; RL=820Ω;CL=20pF |
- |
0.3 |
1.5 |
S |
|
Operating Temperature Range |
Topr |
|
0-85 |
℃ |
||
Installation method




Introduce your content
Answer your customers' common questions
List a frequently asked question
Then provide an answer that will help your customer make an informed purchase.